简介现代汽车电子技术的发展使汽车越来越电子化。尽管电子控制系统提高了汽车的功率和经济性,但随之而来的复杂电路的增加将不可避免地导致车身庞大而复杂的接线。
因此,提高控制单元之间通信的可靠性,实时性和安全性已经成为亟待解决的问题。以研发和生产汽车电子产品而闻名的德国博世公司开发了CAN总线协议并使其成为国际标准。
电动助力转向系统(E1ectric Power Steering System,EPS)是一种可根据驾驶员的意图和车辆的运行状况进行辅助的转向系统。 EPS控制过程是转向助力系统的综合控制过程,因此EPS电子控制单元与汽车中其他电子控制单元之间的通信和协调控制非常重要。
将CAN总线技术引入EPS系统后,EPS电子控制单元便可以与其他车载电子控制单元进行通信,从而实现数据共享并协调EPS与其他系统的控制。 1 CAN总线简介CAN是一个控制器局域网。
它是博世开发的一种现场总线通信结构,用于解决现代汽车中的许多控制和数据交换问题。最大速率可以达到1 Mbps(40 m以内)。
工作方式。与普通通信总线相比,CAN总线数据通信具有出色的可靠性,实时性能和灵活性,并且是当前使用最广泛的汽车网络。
CAN总线具有以下特点:①硬件连接简单,性价比高。 ②具有快速响应能力,非常适合要求实时性高的应用。
③可靠性高。 CAN总线的纠错能力非常强,协议中的每一帧数据都使用CRC和其他校验措施,数据错误率极低。
如果一个节点有严重错误,它可以自动离开总线,并且总线上其他节点的操作也不会受到影响。 2系统硬件设计2.1 LPC2129简介LPC2129微控制器是NXP的32位微控制器之一。
其内部基本结构包括:中央处理器(CPU),两个16C550工业标准UART,高速I2C接口(400 kHz),2个SPI接口,8通道输入捕获/输出比较计时器,1个8通道脉冲宽度调制模块和46个独立的数字I / O端口,此外还有256KB的Flash ROM,16KB的片上RAM。CAN功能块包括2个与CAN2.0B协议兼容的CAN控制器。
这些丰富的内部资源和外部接口可以满足ECU(电子控制单元)进行各种数据处理以及CAN网络数据发送和接收的要求。该芯片集成了2个CAN模块,可以实现高速和低速CAN网络的网关节点功能。
CAN模块遵循CAN2.0B协议,并集成了验收滤波器的CAN总线控制器的所有功能。此外,它还使用高级缓冲区布局来提高实时性能并简化应用程序软件的设计。
2.2 CAN模块设计汽车的通讯系统由EPS控制系统,ABS系统,发动机系统,电动车窗系统,汽车照明控制系统等组成。这些电子控制系统对整个控制系统中的实时响应有不同的要求。
另外,在汽车的实际操作中,许多节点之间需要大量的实时数据交换。如果整辆车的所有节点都挂在CAN网络上,并且许多节点通过CAN总线进行通信,则一旦信息管理配置稍有不正确,则总线负载可能会太大,从而导致系统负担减少。
#39;实时响应速度。这在实时系统中是不允许的,因此根据不同的要求,汽车网络可以分为两个速度级别:高速CAN网络和低速CAN网络。
ABS,EPS和其他节点电子控制单元很少,并且要求高实时性和稳定性,从而形成了具有500 kbps传输速率的高速CAN网络。许多车身电动机和灯节点具有大量的电子控制单元,并且传输的数据也越来越复杂。
对准确性和稳定性的要求优于实时性,形成了传输速率为125 kbps的低速CAN网络。对于不同速率的网络之间的通信,必须有相应的网关进行数据过滤和速率转换,以实现。
-
 用于打印机系统JK
用于打印机系统JK
-
总线切换器
-
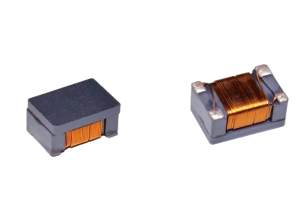 贴片共模电感(适用CAN总线)
贴片共模电感(适用CAN总线)
-
 适用于焊接机LW、SW系列
适用于焊接机LW、SW系列
-
 光颉viking厚膜大功率贴片电阻器(氮化铝基板)(CRP系列)
光颉viking厚膜大功率贴片电阻器(氮化铝基板)(CRP系列)
-
 ALPS轻触按键开关
ALPS轻触按键开关
-
 PDC信昌
PDC信昌
-
人体红外线感应(PIR) 信号处理芯片
-
 通用薄膜电阻器(ARG系列)
通用薄膜电阻器(ARG系列)
-
 光颉viking通用厚膜电阻器(CR系列)
光颉viking通用厚膜电阻器(CR系列)
-
 高可靠性微波电容
高可靠性微波电容
-
 信昌取样电阻
信昌取样电阻
-
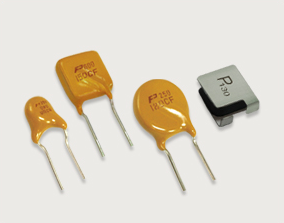 聚鼎PTTC电信设备PPTC自恢复保险丝
聚鼎PTTC电信设备PPTC自恢复保险丝
-
 光颉viking绕线电阻器(KNP系列)
光颉viking绕线电阻器(KNP系列)
-
信号完整性 - ReDriver/ 信号中继器 / 调节器
-
 厚膜通用片式电阻器LF 100ppm(汽车用)
厚膜通用片式电阻器LF 100ppm(汽车用)
-
 硅基ESD静电保护管
硅基ESD静电保护管
-
 耐脉冲电阻(PWR..A系列)
耐脉冲电阻(PWR..A系列)
-
车用肖特基二极管
-
车用肖特基二极管
-
 光颉viking碳膜引线电阻器(CFR系列)
光颉viking碳膜引线电阻器(CFR系列)
公司: 深圳市捷比信实业有限公司
电话: 0755-29796190
邮箱: ys@jepsun.com
产品经理: 李经理
QQ: 2057469664
地址: 深圳市宝安区翻身路富源大厦1栋7楼

更多资讯
获取最新公司新闻和行业资料。
- 基于新型结构的微波电容性能优化研究 新型微波电容结构的发展趋势随着通信技术向更高频率、更小尺寸方向发展,传统微波电容已难以满足现代系统需求。近年来,研究人员致力于开发具有更高性能的新型结构,以突破现有瓶颈。1. 微纳加工技术的应用利用MEMS(微...
- 齐纳二极管与肖特基二极管在汽车电子系统中的协同应用研究 齐纳二极管与肖特基二极管在汽车电子系统中的协同应用研究在复杂的汽车电子架构中,单一类型的二极管难以满足所有功能需求。因此,将齐纳二极管与肖特基二极管进行协同部署,已成为提升系统整体性能的重要策略。本文...
- 如何在8V~29V系统中正确设计P/N沟道MOS管驱动电路 引言:驱动电路的重要性在8V至29V的电力电子系统中,正确设计MOS管的栅极驱动电路是确保器件稳定、高效运行的关键环节。无论是P沟道还是N沟道器件,若驱动不当,可能导致导通不完全、开关速度慢甚至击穿损坏。核心设计原...
- N+P互补对MOS管在8V至29V电源系统中的应用与优势分析 引言在现代电子系统中,尤其是工业控制、汽车电子和高电压电源管理领域,8V至29V的宽电压范围供电需求日益增长。N+P互补对MOS管(即N沟道与P沟道MOSFET组成的互补结构)因其优异的开关性能和高可靠性,成为该电压区间内核心...
- N+P互补对MOS管在8V至29V电源系统中的应用与设计优化 N+P互补对MOS管概述在现代电子系统中,尤其是电源管理、电机驱动和开关电源(SMPS)领域,N+P互补对MOS管因其优异的导通特性与低功耗表现而备受青睐。这种结构由一个NMOS管(N型)与一个PMOS管(P型)组成,形成互补工作模式,...
- 如何在8V–29V系统中优化选择N沟道与P沟道MOS管? 8V–29V系统中N沟道与P沟道MOS管选型策略指南在设计8V至29V的电源管理系统、电机控制器或智能开关电路时,正确选择N沟道或P沟道MOS管至关重要。以下从多个维度提供实用选型建议,帮助工程师实现最佳性能与成本平衡。1. 明确应...
- N+P互补对MOS管31V至100V:高耐压N沟道器件性能解析 N+P互补对MOS管在高压应用中的核心优势在现代电力电子系统中,N+P互补对MOS管因其优异的开关特性与高耐压能力,广泛应用于电源管理、电机驱动及工业控制等领域。其中,工作电压范围覆盖31V至100V的N沟道MOS管,尤其适用于需要...
- 如何在31V至99V系统中正确选择P沟道与N沟道MOS管?技术指南与实战建议 前言:高压系统中的关键元件选择在31V至99V的直流供电系统中,如储能系统、电动工具、医疗设备及智能电网接口装置,正确选择合适的MOS管是确保系统稳定、高效运行的核心。本文将结合实际工程案例,提供一套完整的选型流...
- 薄膜精密电阻器AR..A系列:打造高精度电子系统的基石 薄膜精密电阻器AR..A系列的技术解析与应用价值AR..A系列薄膜精密电阻器是专为高精度、高稳定性电子系统设计的先进无源元件,广泛应用于需要长期精准工作的关键电路中。其核心在于采用真空溅射沉积技术制造的金属薄膜层,...
- 深入解析CRW..A系列与SWR..A系列电阻器在电力系统中的关键作用 CRW..A系列与SWR..A系列在电力系统中的核心价值随着智能电网与新能源接入系统的快速发展,电力设备对过压保护的需求日益增强。浪涌电阻器作为第一道防线,其性能直接关系到系统安全与运行连续性。本文将从技术原理、实际...
- 从5G到7G:三频天线如何重塑未来通信基础设施? 从5G单频到7G三频:通信天线的技术跃迁随着全球对高速、低延迟、大连接通信需求的增长,传统5G单频天线逐渐暴露出局限性。与此同时,7G三频天线作为下一代通信的关键组件,正推动通信基础设施的全面升级。本文将从技术演...
- 深入理解2.4GHz Wi-Fi电路设计:构建高效稳定的无线通信基础 2.4GHz Wi-Fi电路设计的关键要素尽管5GHz频段性能优越,但2.4GHz仍是目前最广泛使用的无线频段,尤其在物联网设备和老旧终端中占据主导地位。因此,科学合理的2.4GHz电路设计是保障整体网络稳定性的基石。射频信号完整性控制2....
- 耐脉冲电阻PWR..A系列与SWR..A系列、CRW..A系列的性能对比分析 耐脉冲电阻PWR..A系列与SWR..A系列、CRW..A系列的核心区别解析在工业自动化、电力系统及高可靠性电子设备中,耐脉冲电阻因其出色的抗冲击能力而备受青睐。其中,PWR..A系列、SWR..A系列和CRW..A系列是市场上常见的三大类耐脉冲电...
- 气体放电管在通信系统中有哪些用途? 气体放电管在通信系统中主要用于防雷保护和瞬时过压保护。它可以将雷电流泄放入大地,以防止通信系统遭受雷电侵害。此外,它还可以用于通信产品类端口、工业产品类端口以及消费电子类端口的保护。在通信系统中,气体...
- 深入解析电阻阵列CN..A系列与SWR..A系列、CRW..A系列的核心差异 引言在电子元器件领域,电阻阵列因其高集成度、稳定性和空间节省优势,广泛应用于精密电路、工业控制及通信设备中。其中,CN..A系列、SWR..A系列和CRW..A系列是市场上常见的三种电阻阵列型号。尽管它们均属于电阻阵列类别,...
- 30V互补对N+P MOS管 在现代电子设备中,MOS管(金属氧化物半导体场效应晶体管)是不可或缺的组件之一,广泛应用于模拟和数字电路设计中。特别是对于30V互补对N+P MOS管,它在高压应用中表现尤为突出,能够提供优异的性能和稳定性。30V互补对N+...
- N+P互补对MOS管工作原理 N沟道和P沟道互补型金属氧化物半导体(CMOS)技术是现代集成电路中最常用的技术之一。CMOS技术利用了N沟道MOSFET(NMOS)和P沟道MOSFET(PMOS)两种晶体管的互补特性,从而实现了低静态功耗、高噪声容限和较好的逻辑电平转换能力...
- 基于CY9BFx2xK/L/M MCU的I2C多任务器系统设计与优化策略 基于FM3 CY9BFx2xK/L/M MCU的I2C多任务器系统设计深度剖析随着物联网(IoT)设备复杂度提升,单片机系统面临越来越多的外设接入需求。采用I2C多任务器配合高性能MCU是当前主流解决方案之一。本文以富士通FM3系列中的CY9BFx2xK/L/M MCU为...
- 基于西门子PLC的工业温度监控系统中MLCC电容选型指南 精准选型:保障西门子PLC温度监控系统的可靠运行在现代工业控制系统中,温度监控不仅关乎生产安全,也直接影响设备寿命与能效。以西门子PLC为核心的温度监控系统,其稳定运行依赖于每一个电子元器件的精心选型,其中普...
- DiSEqC接口与DIOFET、GaN MOSFET技术对比分析:卫星通信系统中的前沿选择 DiSEqC接口与DIOFET、GaN MOSFET技术对比分析在现代卫星通信系统中,信号传输的效率与稳定性直接关系到用户体验。随着技术的不断演进,DiSEqC(Digital Satellite Equipment Control)接口作为控制多路卫星接收设备的核心协议,已广泛应用...